This tool version is unpublished and cannot be run. If you would like to have this version staged, you can put a request through HUB Support.
You are here: resources › Tools › Dynamic Roller Compactor › About
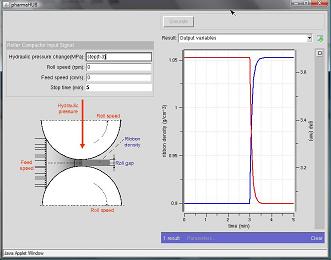
Dynamic Roller Compactor
Dynamic simulation of roller compaction for dry granulation
Launch Tool
Archive Version 1.0.1
Published on 15 Feb 2012
Latest version: 1.0.2. All versions
This tool is closed source.
Category
Published on
Abstract
A dynamic model for roller compaction process is derived based on Johanson’s rolling theory and material balance. Johanson’s rolling theory is used to predict the stress and density profiles during the compaction and the material balance equation describes the roll gap change. This model considers the production rate as well as the roll force, so it becomes possible to design, optimize, and control the process based on the model.
The simulator was built using Matlab. The user can vary three input variables: roll pressure, feed speed and roll speed. They can be specified as a function of time. For example, if the roll pressure is assigned as 1*step(t-3), the simulator increases the roll pressure from 1MPa to 2MPa at t = 3 min. All Matlab functions are supported for specifying the patterns of the input variables.
Sponsoredby
NSF Engineering Research Center for Structured Organic Particulate Systems
References
1. Johanson, J. R. (1965). A rolling theory for granular solids. Transactions of the ASME: Journal of Applied Mechanics, Series E, 32(4), 842-848.
2. Bindhumadhavan, G., Seville, J. P. K., Adams, M. J., Greenwood, R. W., and Fitzpartrick, S. (2005). Roll compaction of a pharmaceutical excipient: experimental validation of rolling theory for granular solids. Chemical Engineering Science, 60, 3891-3897.
3. Hsu, S.-H., Joglekar, G., Reklaitis, G. V., and Venkatasubramanian, V. (2007). Model Predictive Control on Roller Compaction for Pharmaceutical Manufacturing. AIChE 2007 annual meeting, Salt Lake City, UT.
4. Hsu, Shuo-Huan (2008), "Dynamic Simulation of Roller Compaction", https://pharmahub.org/resources/244.
Cite this work
Researchers should cite this work as follows: